

Armattan Chameleon 5"を組み立てていきます。
今回使うパーツのリストは下記の前回記事をご参照ください。
Armattan Chameleon 5" 組み立て <1> パーツリストとフレームの準備

今回はFCと受信機の取付けをやっていきましょう。
これらを取付けたら後はトッププレートなどを取付けて全体をまとめれば完成なのですが、字数制限の都合で今回は最後までいきません。
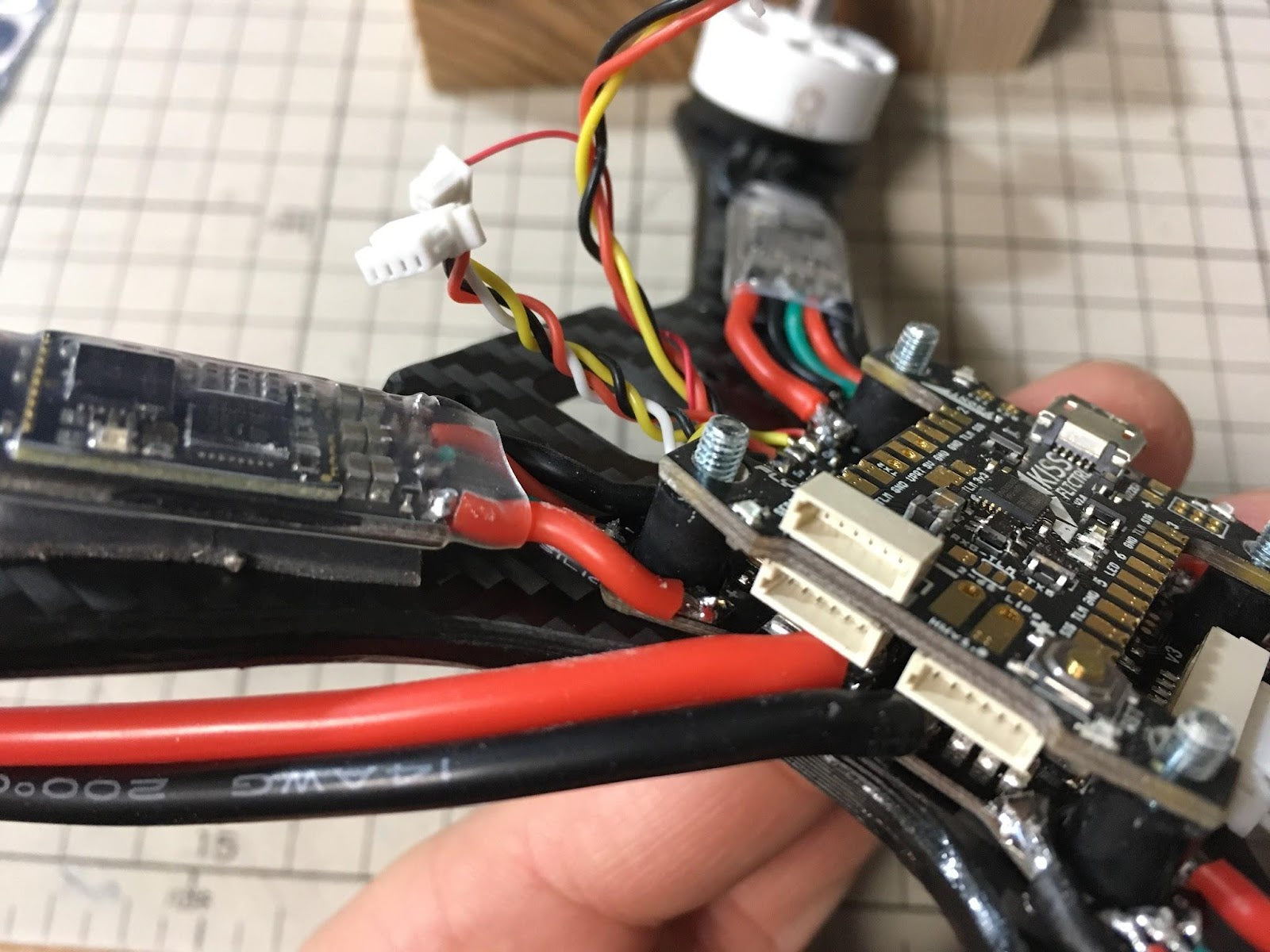
上記写真はとりあえずFCをスタックに取付けてみたところなのですが、ゴムのスタンドオフを使っているため、何もせずとも取り付ける事自体は可能です。
ナイロンのスタンドオフだとこの時点でうまく入らなかったりします。FLYDUINO KISS FC V2はそれで正常です。

フライトコントローラーが振動を拾わない様に、毎度の事なのですが、FLYDUINO KISS FC V2の穴を少しヤスリで広げてあげましょう。
FLYDUINO KISS FC V2は穴のすぐそばを電線が走っていないようなので大丈夫なのですが、FCやESCによっては穴のかなり近くまで電線が張り巡らされているものもあるので、なんでもかんでもヤスリで穴を広げれば良いというものでもないみたいです。
再びFCを乗せてみるとここで問題発生。
電源用ピッグテールがFCのコネクタに干渉してしまいます。

FCを回転させるなど色々な案を考えたのですが、もう少しFCの位置を上げるのが一番良さそうです。ラバースタンドオフをメインフレームに固定するネジを10mmのものに変更。
この10mmのネジはChameleon 5"に付属しているものだけでは足りないと思いますので別途準備する必要があります。

そして一旦Chameleon 5"に付属しているナイロンのナットでメインフレームにネジを固定してしまい、その上にラバースタンドオフを取り付ける事に。これでFCの位置が2mm程度上がります。
説明を忘れていましたが、ImpulseRC WOLF V3 PDB OSDとFLYDUINO KISS FC V2はWOLF V3 PDB OSDに付属のワイヤーで接続します。
まず、大きなコネクターをImpulseRC WOLF V3 PDB OSDに接続しましょう。ちょうど上の写真でコネクターが刺さっているところが写っていますが、左側が白、右側が黒になる向きでうまく接続できるはずです。

次に、白と黒の束をそれぞれ捩ってFCに接続するのですが、白ワイヤーのコネクターをFCの方向で言うと前側裏面のコネクター、黒のワイヤーのコネクターはその隣、後ろ側裏面のコネクター。
文字にするとかなりわかりづらいですが、上の写真のようになります。白いコネクターの方には表面にもコネクターがあるのに対し、黒のコネクターの表面はBootボタンやwolf PDBなどを使用しないセッティングで電源供給に使うハンダパッドなどがあります。

このセッティングで電源ピッグテールとの干渉もかなり改善されました。
FCを固定してしまう前に受信機の配線をしてしまいましょう。

上の写真で少し見づらいのですが、FCの上の列、右から4つめのハンダパットからUPRT、5V、GNDの3つにハンダを盛りました。自分はFrSky XM+と言うFrSky SBUSの受信機を使用するのでこの3箇所になります。
FUTABA SBUSで使用する方も大体この3箇所で問題ないと思うのですが、 受信機の電源が5Vで良いのかどうかは念のため確認した方が良いかと思います。

わかりやすく、図も参照するとSbus(オレンジ)、5V(赤)、GND(青)と記載されている3箇所になります。

FrSky XM+はコネクターがはじめから付いているタイプではなく、ハンダで受信機基板に直接ワイヤーを取り付けられるので、説明書通りに上からGND(黒)、5V(赤)、SBUS(緑)とワイヤーをハンダしました。
ちなみに、このワイヤーはETHIX QUAD-BUILDER ケーブルセットの26awgと言う太さを使用。ETHIX QUAD-BUILDER ケーブルセットに26awgは緑と黒しかないので、赤は似た太さの別のパーツの余りを探して来て使用しました。

先ほどFCでハンダを盛っておいたところにSBUS(緑)、5V(赤)、GND(黒)の順番でハンダ付けし、ワイヤーを軽く捩ってFCとPDBの間を通して機体お尻側へレイアウトします。
これで受信機の配線は完了です。

あとでよく確認したらChameleon 5"の付属品でさらに4つナイロンナットがあったのですが、この組み立ての時に少しバタバタしていて、とりあえず手元にあったホームセンターのM3プラスチックナットを使用してFCを固定しました。付属の黒いナイロンナットでも同じなので大丈夫です。

バタバタした理由がこれ、FPVカメラゲージとメインフレームの接続部分がFC固定用のナットに当たってしまうかどうかの問題。本当はナイロンナットの下にラバードーナツをつけてからナイロンナットで締め付けたかったのですが、それだと常に触れている感じに。
触れていてもラバードーナツとラバースタンドオフの両方で衝撃が吸収されるなら大丈夫な感じもしたのですが、今回はラバードーナツを使わない事で常には触れていない形になりました。
ラバースタンドオフでFCがフロント側に動いた際に当たるのですが、このセッティングで飛行して特に問題は感じられなかったので、今回はこのセッティングでいきたいと思います。
Chameleonに限らずArmattanは結構高さがシビアだなぁと思うのですが、重心を下げる為のデザインがArmattanの良さでもあります。
高さに余裕があるとFCのスタックに沢山の基板を積めるので様々なパーツ構成が可能ですが、飛ばしていて感じる独特の安定感は無くなってしまうので、どちらが好きか次第という事ですね。

ここまで来てカメラゲージの取付けをもったいぶるのも変なので、取付けてしまいます。
M2の12mmと言う細長いネジを4本使ってメインフレームにチタンのカメラゲージを取り付けましょう。

説明書でもわかりやすく図解されています。チタン製のカメラゲージでコの字型になっている部分をメインフレームに差し込み、下からネジで固定します。

この時、FPVカメラのコネクターを差し込んでおいた方が楽です。

あとはM2ネジで4箇所をとめればOKです。
今回はここまで!










