

Tadpole 2.5" のテストフライトの様子を動画にまとめてみました。
左上のNTSCとか、消しておけば良かったなと思いつつも、なんとなく雰囲気だけでも伝われば幸いです。
結構フライトもなかなか本格派で、フリースタイル入門用途としても、経験者が手軽に遊ぶ用途としても良いのではないかと思います。
今回動画のフライトでプロペラはHQ DURABLE PROP T65MMを使用していますが、HQ DURABLE PROP T2.5X2.5X3でも飛行可能です。HQ DURABLE PROP T2.5X2.5X3の方が風の影響でゆっくりした振動が出やすいのですが、程よい重量感があり、狭く風の少ないところでは良いかも知れません。
バッテリーはTattu 3S 650mahとTattu 3S 450mahをテストし、Tattu 3S 450mahの方が軽やかで飛行時間もさほど差が出ないのでオススメです。
自分はTattu 3S 450mahを一本しか持っていなかったので、3S 650mahをメインで使用しましたが、別にそれでも問題はありませんでした。プロペラやバッテリーの変更の際にBetaFlightの設定の変更はしなかったのですが、うまく飛んでくれました。
今回でArmattan Tadpole 2.5"の設定も最終回です。
使用している機体の組み立て方は下記の記事になります。
- Armattan Tadpole 2.5" 組み立て <1> フレーム
- Armattan Tadpole 2.5" 組み立て <2> FC・ESC、モーター、受信機の取り付け
- Armattan Tadpole 2.5" 組み立て<3>FPVカメラ・VTXの取り付け
前回の設定記事もよろしければ合わせてご参考ください。

そして受信機とプロポをバインドした後、Receiverタブでプロポの設定をおこないます。
最近はずっと同じモデルの受信機(FrSky XM+)を使用しているので、プロポ内ですでに作ってある他の機体のデータをコピーしてバインドしてあげれば大体大丈夫です。
プロポの設定に関して過去に詳しく書いたものがあるので、ご興味がある方は下記の記事も合わせてご参考ください。
BetaFlightセットアップ (1) プロポの設定
今回のポイントとしては、右上側の区画のRSSI ChannelをAUX12にしてあります。
FrSky XM+の場合これでRSSIの数値をOSDに表示可能になります。
あと、'Stick Low'Thresholdと'Stick High'Thresholdを1000と2000にしています。

'Stick Low'Thresholdと'Stick High'Thresholdの設定とAIR MODEの位置、さらにプロポの方でidle upの設定を組み合わせる事で安全対策を施しています。
モードを3段スイッチに割り当て、スイッチ上と下ではアームが可能だがAIR MODEには入らず、スロットルも低い数値で固定されてしまう設定、スイッチ中段ではAIR MODEに入り、スロットルもスティックが反映されるがアームできないと言う設定になっています。
飛ばすための手順としては、まずモードスイッチ上か下の状態でアームし、そのままモードスイッチを中段に変更してAIR MODEで飛ばす感じです。
上記画像ModesタブでAUX2に割り当てられているスイッチの上と下の位置にプロポ側でidle up(OPEN TXではSPECIAL FUNCTIONSでOverride -100に設定)しているので、モードスイッチが上と下の時は'Stick Low'Thresholdが1000以下の数値となりアームが可能になります。
逆に、idle upが効いていないスイッチ中段の時に'Stick Low'Thresholdが1000以下にならない様に、スロットルCHの低い側のエンドポイントを最小でも1000以上になるように設定(OPEN TX ではOUTPUTSタブで設定)すると。
まぁ、文字で説明するとちょっと複雑で面倒臭い感じになっているのですが、間違ってアームしてしまった時にAIR MODEになっていると非常に危険なので、ちょっと工夫しているというわけです。
Modesタブでは上記の4つだけを設定しました。最低限ですね。

さて、この辺りでMotorsタブでモーターを回してみて、どの数値でちゃんとモーターが回りはじめるか確認します。今回は1021で回り始めたので、1021+30 -1000 ÷10=5.1。
Motor Idle Throttle Valueに5.10と入力しました。

最後にPID Tuningタブです。
PIDの数値はとりあえずデフォルトのままで、飛行しながら問題があれば調整しましょう。
自分としては、下の方のVbat PID CompensationをON。
あとはI Term Relaxの部分をAxesをRPYに、TypeをSetpointに、Cutoffを13くらいでスタートしています。AxesとTypeは機体によってフリップ時にバウンスバックが出たり変な挙動があったら変更してみますが、最近はこの組み合わせが良さそうに感じています。
Cutoffの数値はかなり飛び方と好みで変わってくると思いますが、自分は最近13くらいが良さそうだなと。
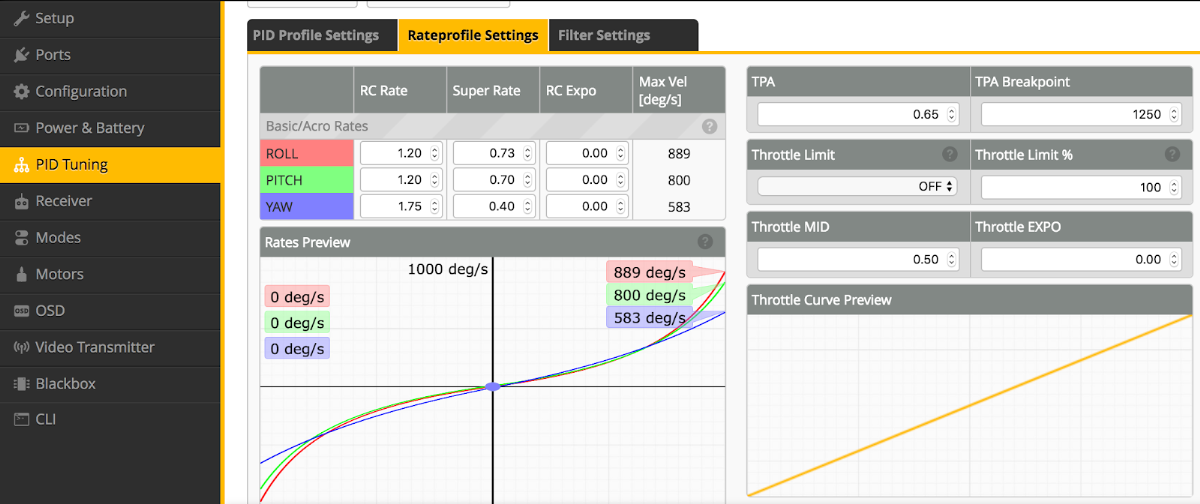
Rateは好みのものを設定すれば良いので好みで入力すればOKです。
TPAなどもとりあえずデフォルトのままにしました。

そのとなりのFilter Settingsですが、まず下の方のDynamic Notch Filterを上からLOW、0、200、90に設定。
5インチでもこの設定で、ここまで小さいと流石に周波数も変わってきそうですが、3インチでも同じ数値で大丈夫だったので今回もこの数値で試してみます。

最後にフィルターのスライダーですが、これはモーターの熱を確認しながら右に動かして行きます。上記画像の位置くらいまで行くとかなりプロップウォッシュが減ってくるのがわかるかと思います。
あとは好みでOSDに表示する情報をレイアウトすればOKです。
とりあえず設定は以上で、今回は手順としてすでに記事にしている事ばかりだったので、最低限、最短の設定をさらってみました。やはり、まぁまぁ設定しなくてはならない部分がありますね。
ただ、最近のBetaflightはPIDがデフォルトでとほんどの場合大丈夫かなと思います。
良い感じのデフォルトになったので、以前のように上記の設定のあと丸一日かけて飛ばしながらPIDの調整が必要な事はあまりなくなりました。
今回のTadpoleもデフォルトでこれと言った問題はなく、ここからは好みで調整すれば良いと思います。
ただ、なぜか自分の場合、5インチ機体などで6SだとPIDがデフォルトではあまり良くない場合が多いです。また、モーターとプロペラの相性が悪いものだといつまでたっても良い感じの設定が出せない場合があり、こういう場合は思い切って別のプロペラを試す方が早く良い感じになったりしました。
BetaFlightもRPM Filterが登場してから凄く良くなったので、こういう手のひらサイズの小さな機体でも、スムーズで本格的なフライトが楽しめるようになりました。本当にありがたいなぁと思います。
マイクロで比較的手軽に楽しめるので、ご興味ある方は、是非トライしてみてください。










