

さて、今回はConfigurationタブと、合わせてESCの方も設定していきたいと思います。

上記が今回カスタムデフォルトで設定された形です。

まず、Configuraterを開く度にまだ警告が出ていると思うのですが、ESC/Motor Featuresを設定していきます。左側のMixerはモーターリバースの設定を行いたい方は変更すると思うのですが、自分は変更していません。モーターの位置と番号をしっかり覚えておくとこのあと便利です。
ESC/Motor Featuresの区画で、まずESC/Motor protocolの設定。今回は迷いましたが、実績のあるDSHOT600を選択しました。
次のMOTOR_STOPの設定は、アームした時にプロペラが回らないようにする設定で、アームされているかどうかわからず危険なので設定しないのが一般的かなと思います。
ESC_SENSORは今回使用しているのでONに。Bidrectional DShotもRPM Filterを使用したいのでONにします。
Motor polesに関して、デフォルトの14は主に5インチ機で使用される23XXや22XXで一般的な数値です。今回使用しているETHIX FLAT RATS (1507/2800KV)は数えたら14だったのでそのままなのですが、HGLRC Forward 1408などの多くの3インチ用モーターは12の場合が多いのでご注意ください。

この数値はモーターのベルについているマグネットの数を数え、その個数を入力すれば良いのですが、グルグル回してどこから数え始めたかわからなくなってしまうので、数え始めのマグネットにテープなどで印をつけておくと安心です。
Motor Idle Throttle Valueを今回5に設定しましたが、これを計算する為にはモーターを回してみる必要があります。せっかくモーターを回すので、ESCの設定も合わせてやっていきたいと思います。ESC/Motor protocolの設定が完了していないとESCにアクセスできないので、一旦ここでSave and Rebootボタンを押しましょう。

ダウンロードしておいたBLHeliSuiteを立ち上げます。
そして、ESCを起動して接続するのですが、設定時にバッテリーを繋ぐときは危険ですので必ずプロペラを外しましょう。
確認の為に途中でバッテリーを繋いだりしていない方は、機体にバッテリーを繋ぐのがこの時初めてになるかも知れません。バッテリーを接続する前にもう一度よく配線を確認しておきましょう。自分も焦っていたり、疲れているとよくやってしまうのですが、結構基板を壊してしまうのはこのタイミングです。

そんな緊張感溢れる瞬間に、少しでも保険をかけたい方にオススメなのがTBS SMOKE STOPPER。回路に問題がある場合は基板が壊れる前に先回りしてヒューズが飛ぶというスグレモノで、使い方も機体とバッテリーのコネクターの間に取り付けるだけなので簡単です。XT60でもXT30でも使用可能。
これを使用すれば100パーセント安心という事では無いのですが、この有難みは壊した事のある人しか分からないかも知れません。1つでも基板が守られればラッキーです。当然、回路に問題が無い事がわかればもう必要ないので、これをつけたまま飛ばす必要は一切ないです。

バッテリーを接続したら、緑の線で示したPortが正しい事を確認して赤の円で示したConnectボタンを押します。

すると、赤円で示した部分に4つの影が現れます。まだこの状態ではESCの情報は上記パラメーターに反映されていません。緑色の円で示したRead Setupボタンを押して読み込みます。

すると情報が一覧で表示され、ESCの設定状況がパラメーターに反映されます。

これで全体の設定がパラメーターに反映されています。この数値はデフォルトではないのですが、ほとんどデフォルトのままです。この状態で数値を変更しWrite Setupボタンを押すと、4つのESC全てに設定が書き込まれます。

例えば、モーターの回転方向など全てではなく一部のESCの設定だけ変更したい場合は、緑色の円で示した数字をクリックして、設定したESCの数字だけ表示されている状態にします。
この状態で数値を変更してWrite Setupボタンを押せばOKです。初めてだとちょっと分かりづらいかも知れません。

確か、今回デフォルトから変更したのは上記の3点。
緑色の四角で示したMotor Timingは多くの場合Autoでうまく動作するのでAutoに。
赤色の四角で示したMinimum ThrottleとMaximum Throttleは一応1000と2000に変更したのですが、BLheliのマニュアルを読むとDshotの場合この設定値は無視されるそうなのでデフォルトで問題ないようです。
青色の四角で示したPWM Frequencyに関して、今回使用しているHolybro Tekko32 F3 4in1 mini ESC (45A)はデフォルトで96kHzに設定されています。結構がんばって調べたのですが、まだBetaflightで96kHzを利用した有効な情報というか、メリットの大きさが不透明な部分があったので、今回は実績をとって48kHzに設定しました。
Holybroの基板は毎回時代を先駆けている感じがありますね。Betaflightで検証するかどうかはわかりませんが、今度5インチ機を使用して色々試してみたいと思います。
設定が終わったら最後に紫色の四角で示したWrite Setupボタンを押しましょう。

すると、書き込みました、という表示が出ます。
さて、全体的なところはこんな感じで、次にモーターの位置、回転方向の確認と修正。それと合わせて、Motor Idle Throttle Valueを求めるところまでやっていきたいと思います。

まず、緑色の円で示したMotorsのタブに移動します。ここを押すとFCとESCが再起動しますが、正常ですので心配しなくても大丈夫です。

次に、モーターにケーブルなど触れていない事、もちろんプロペラがついていない事を確認して緑の円で示したチェックボックスにチェックします。

あとはスライダーをあげていけば対応するモーターが回転します。一番右のMのスライダーは全てのモーターを回転させるスライダーになります。
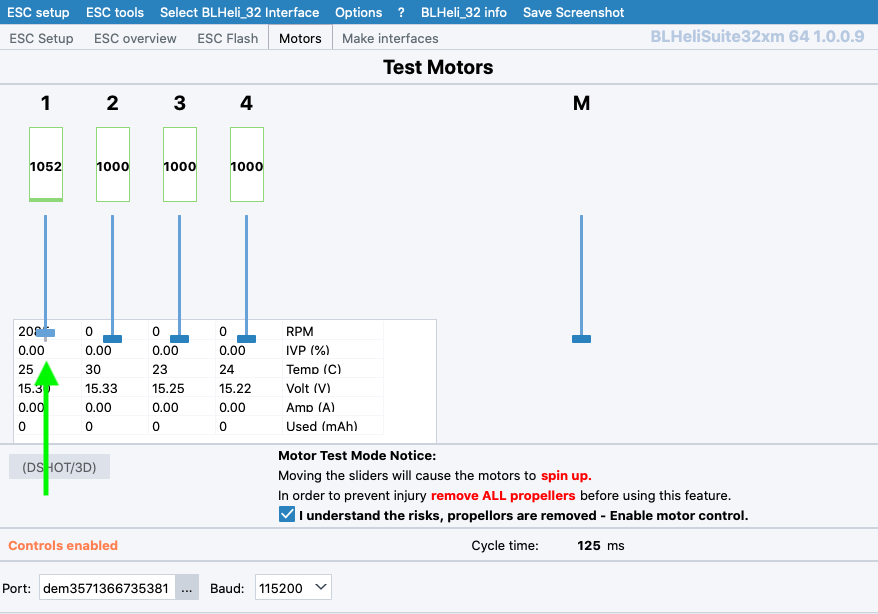

モーターの位置と回転方向を確認したいので、モーターを1つずつ回してスライダーの番号とモーターの位置が一致しているかどうか、また、回転方向が図の通りかどうかを確認します。位置が間違っている場合はESCの取り付けが間違っている可能性が高く、その辺りから確認する必要があります。
回転方向は設定で変更しますので、違っていたモーターを覚えておきましょう。

次に、モーター全てを回すスライダーを少しずつあげてモーター全てがつかえたりせずに、ちゃんと回る最小のポイントを探します。今回赤い色の円で示した数値が1020の時に全てのモーターが回りました。スライダーは、一度クリックしてキーボードの上下ボタンで少しずつあげる事ができるので、使用すると便利です。

モーターの回転方向が違ったモーターに関しては、ESC Setupタブから変更しましょう。
まず、緑色の円で示したタブをクリックし、先ほどと同じ手順ですがRead Setupボタンを押して設定を読み込みます。
次に、赤い円で示した数字で回転方向を変更したいモーターの番号を表示状態にします。
青い四角で示した部分がモーターの回転方向なので、スライダーを動かしてReversedの設定にし、最後に紫色の四角で示したWrite Setupボタンで書き込めば回転方向が逆転します。
設定し終わったら必ずMotorsタブに戻り、再度回転方向が正しいか確認しましょう。

これでESCの設定は完了なのでバッテリーを外し、Betaflight Configurator のConfigurationタブに戻ってきました。
Motor Idle Throttle Valueの数値の出し方なのですが、先ほどモーターを全て回して計測した数値に30を足し、1000を引きます。その結果を10で割った数値をここに入力します。
今回計測した数値が1020だったので
1020+30-1000=50、50÷10=5という形になります。

続いて設定を進めて行くのですが、緑色の四角で示したSystem configurationの区画は今回デフォルトのままで良いかなと思います。F4のフライトコントローラーなどを使用している場合はCPUがオーバーロードしてしまうとまずいので、PID loop frequencyを4kに落としてDshot300を使用したりするのですが、今回はF7ですし、実際使用してみて大丈夫だったのでこのままでいきます。
Barometerは今回のセッティングではあまり使用しないのでどちらでも良いのですが、せっかく搭載されているので今回はアクティブのままにしました。
赤い四角で示したBoard and Sensor Alignmentは変更していないのですが、カスタムデフォルトで設定された数値なのかなと思います。Setupタブでどうしてもアニメーションと実際の機体の向きが一致しない場合はこちらを変更して対応する形になるかと思います。
紫色の四角で示したArmingの区画は、Accelerometerをアクティブにしていると現れる区画です。アーミングを許可する角度を設定する部分で、180度に設定します。つまり機体が垂直の状態でもアーミングできるという設定で、この設定にしておくと木に引っかかってしまった時などでもモーターを回せるので、うまく脱出できれば機体を諦めたり木登りしなくても良い、というところです。

緑色の四角で示したReceiverの区画ですが、今回デフォルトのままで大丈夫でした。ご自身のプロポと受信機に合わせて変更するものなので、ご使用のものに設定しましょう。
赤色の四角で示したOther Featuresも今回はデフォルトのままで大丈夫かなと思います。
LEDを使用していればLED_STRIPをONにしたり、AcroモードとAirモードを使い分けたい場合はAIRMODEをOFFにしたりします。
紫色の四角で示したDshot Beacon ConfigurationはデフォルトでOFFですがどちらもONにしました。プロポとの接続が切れた場合と、スイッチ操作でブザーを起動した場合にDshot Beacon(モーターが振動してブザー音を鳴らす)動作をさせるかどうかの設定です。
この下もまだブザーの設定が続きますが、いつも全てデフォルトのままにしています。
上記画像の右側にもRSSI、3D ESC/Motor Features、GPSの設定がありますが、今回RSSIはAUXチャンネルからとるので無視してよく、3D ESC/Motor Featuresはモーターを逆回転させて背面状態で上昇できるというトリッキーな設定の為の区画です。
今回GPSは搭載していないのでここもOFFのままですが、いずれ別の機会に紹介したいと思います。
ESCの設定も並行しておこなったので長くなってしまいましたが、今回はここまでです。










