

DIYマルチコプターの組み立て
今現在入手しにくくなってしまっているものも多いのですが、この記事では比較的古くからあるスタイルのパーツを多くセレクトしていますので、今あるフリースタイルやレース向けに作られたパーツを使用するのとは一味違う機体の組み立て手順になります。
Pixhawkでレースやフリースタイルで使用するようなESCやモーターを使用する事も、もちろん可能なのですが、今回組み立てるような10インチクラスの機体に最適なモーターのサイズと回転数の商品は、あまり頻繁に新しいものがリリースされていません。
古くからあるスタイルの方が情報も多く、探すのも楽だと思います。
一方、今回プロポと受信機のところで使用するMK15Eや、FCのPixhawk4miniなど、通信や飛行制御の部分で使用しているパーツは、現時点で最新ではないにしても結構新しいもので、なかなか多機能。
フレームのパーツ点数であったり、接続するケーブルも多少ありますので、この組み立て記事は前編・後編の2回に分けて簡単に紹介したいと思います。
STEP1: モーター周辺

X500には組み立て説明書が付属していますので、今回はなるべくフレームの説明書の手順を追う流れで進めていきたいと思います。
実際には、説明書通りの手順では組み立てづらい場合もあるのですが、それはフレーム構造を理解して初めてわかる事であり、どうしても少し進んではまた戻って、といった形で進めるようなイメージになります。
フリースタイルやレーシング用のフレームとは異なり、パーツが頻繁に破損しメンテナンスを行うタイプのものではないので、フレーム構造もそれなりに複雑(フリースタイルやレーシングと比較すると)でパーツ点数も多いので、焦らず説明書を見ながらじっくり取り組むのが良いかなと思います。

説明書のSTEP1ではモーター周辺が取り上げられている為、AIR GEAR 450の準備から始めます 。

AIR GEAR 450のモーターとESCの接続は直接ハンダする事もできるのですが、バナナプラグの様なコネクターで接続するパーツが付属していますので、モーターのワイヤーにプラグを取り付けました。
AIR GEAR 450のモーターの回転方向を変更する場合、この3本のワイヤーのうち2本を差し替える事で回転方向を逆にできるので、ハンダしてしまうよりもプラグで接続しておいた方が後で楽になります。
自分はDIYマルチコプターが世に出てきたばかりの時からやっていたというわけではないので、歴史についてしっかり語ることは出来ないのですが、こういったコネクターでモーターとESCを接続する製品は自分がはじめた時点で既に「以前からある」ものとして知られ、普及していました。
フリースタイルやレースはクラッシュの衝撃に耐える必要があるため、基本的には直接ハンダ付けするスタイルが一般的ですが、GPSでホバリングできたり、比較的安全な飛び方をするDIYマルチコプターでは、こちらのスタイルの方が今でもスタンダードなのではないかという印象を持っています。

4つのモーター全ての作業が終わりました。
上から見るとわかるのですが、4つのモーターのネジ部分の頭に銀色の印があるものと、ないものとがあります。
AIR GEAR 450のモーターはCW(クロックワイズ=時計回り)用とCCW(カウンタークロックワイズ=半時計回り)用がそれぞれあり、この印のおかげで取り付けるプロペラがわかりやすくなっているわけですね。
実際の回転方向はモーターの作りではなく配線によって変わるのですが、プロペラの取り付けネジ方向がCWとCCWで異なりますので、モーターをフレームに取り付ける際に注意が必要です。

今の時点ではモーターを支持するパーツに取り付けるところまでなので、特に何も考えずに作業を進めてしまいます。
これであとはアームとなるカーボンパイプに刺し込むだけというところまで来ました。
カーボンパイプを刺し込めるように、説明書でMotor Baseと呼ばれている2枚のカーボンプレートを固定しているネジは仮止めにしておいて、次のステップに進みたいと思います。
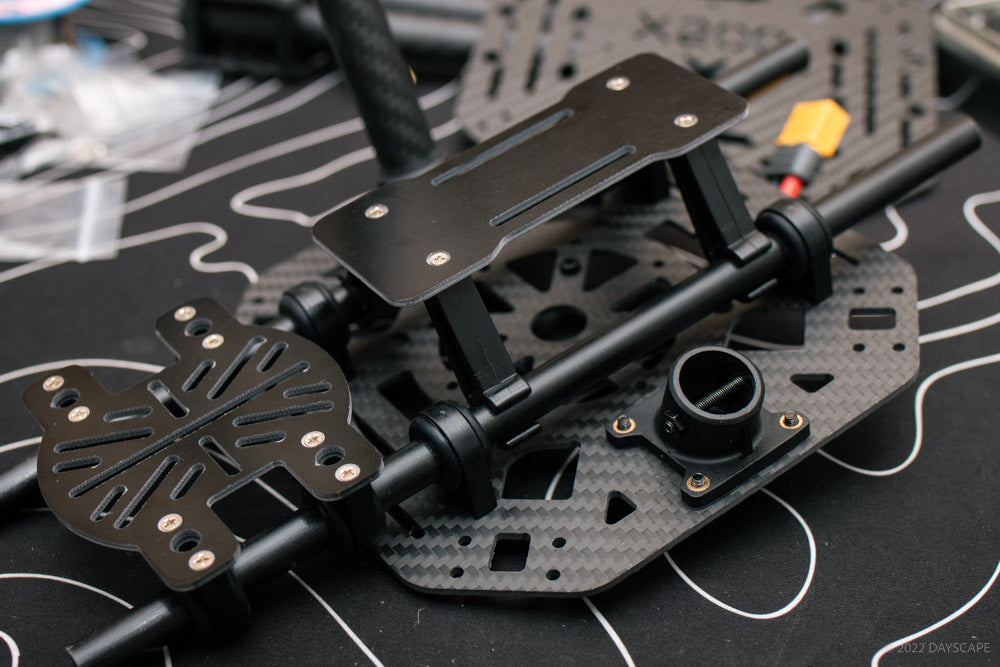
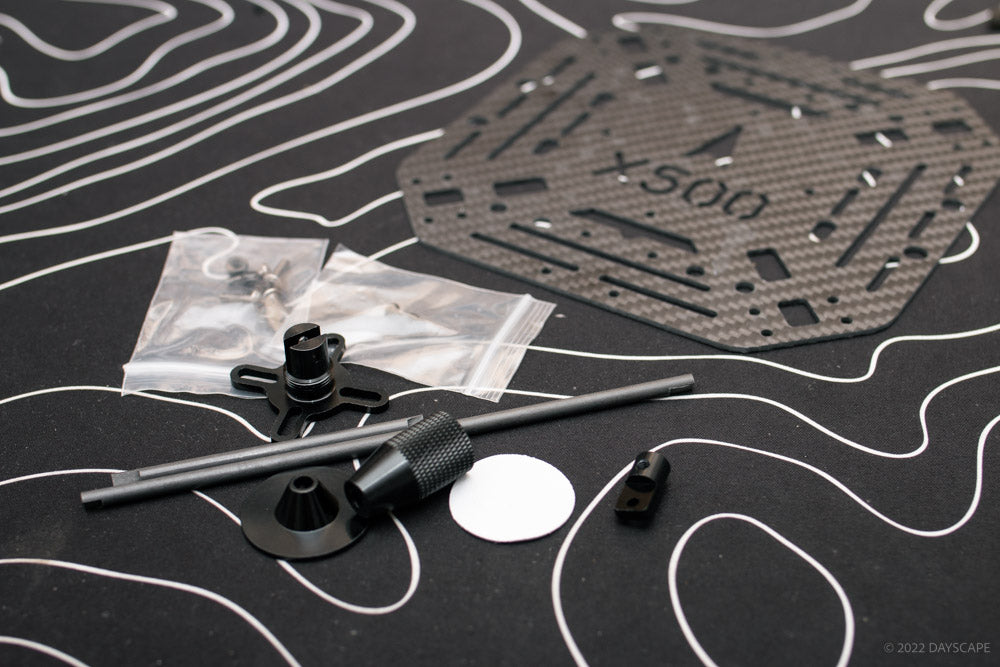
STEP2: バッテリー周辺
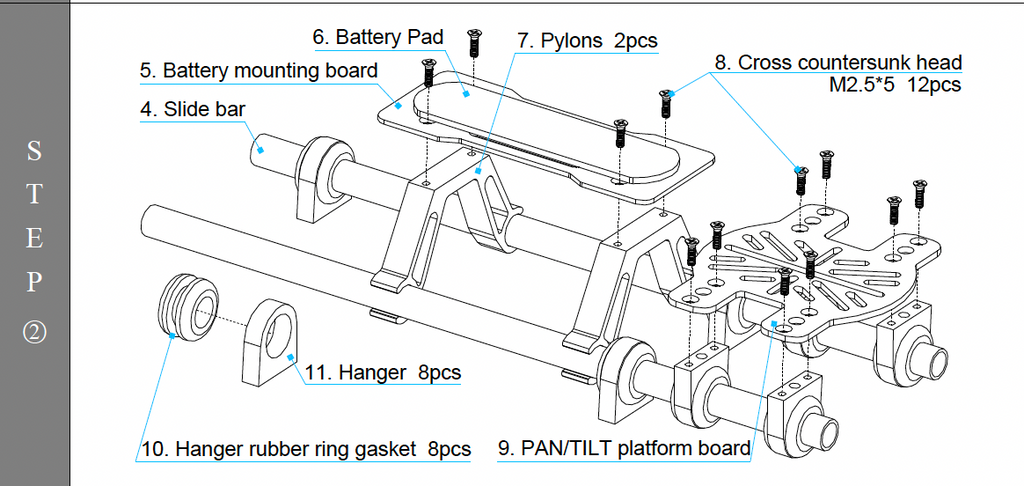
STEP2は機体の下部、スキッドの間にバッテリーやペイロードなどを取り付ける為の部分を組み立てる作業になります。
上記取説画像は、実際に取り付ける際には上下反転する形なのですが、独立してある程度組み立てておきましょう。

この場合、写真より説明書の方が手順はわかりやすいように思います。

カーボンパイプとゴムがなかなかしっかり固定され、動かす際に強い抵抗感がありますので、説明書で11.Hangerと表記されているパーツを1つずつ良い位置まで動かしてからねじ止めするのが良さそうです。
STEP3-1: バッテリー周辺をボトムプレートに取り付け

フレームの組み立て説明書では全5STEPで終わる事になっているのですが、今回配線も同時に行っている為、ここからは1つのSTEPに対していくつかの作業を追加で行います。
上記の説明書では図の中で順番の指示がありませんが、バッテリー周辺のユニットを取り付ける前に、ボトムプレートと呼ばれる部分にPM06 V2 (電流系+PDB)を取り付けておきます。
これは、先にバッテリー周辺を取り付けてしまうと、PM06 V2のスタンドオフを固定するネジの頭にアクセスできなくなる為です。

PM06 V2には30.5mm×30.5mmの間隔で取り付け用の穴が空いており、ボトムプレートにもそれに合う穴が空いているため、付属のスタンドオフで簡単に取り付ける事ができます。
このボトムプレート、前後が入れ替わってしまっても基本的には大丈夫だと思うのですが、左右はスキッドが取り付けられるようになっていますので、ある程度完成した時の方向を意識して電源用ケーブルが出る方向を決めるのがよいと思います。
前後に関しては、よく見ると肉抜きのパターンに違いがあり、この辺りは取説を注意深く見るとわかります。
上記写真ではボトムプレートの向きは説明書通りにしていて、機尾方向に電源用ケーブルが来る様に取り付けました。
先ほど組み立てたバッテリーやペイロードを取り付けるユニットをボトムプレートに取り付けます。
参照している説明書では、スキッドの根元部分を取り付ける工程が抜けている様だったので、このタイミングでスキッドの根元も取り付けました。
STEP3-2: PDBとESCの配線

次のステップではトッププレートを取り付ける工程になってしまいますので、PBDとESC間の配線はここで完了させておいた方が良さそうです。
STEP1でこのモーターには回転方向が決められている事を記載しましたが、フレームに取り付ける際に、正しいところに正しい回転方向のモーターを取り付ける必要があります。
実際にトッププレートを取り付け、アームが固定されるのは次の工程ですが、ある程度完成形に近い形で準備をしておきましょう。

上記がPX4のQuadrotorXと呼ばれる形のモーター回転方向と、モーターの番号です。
KISSともBetaflightとも異なりますので、Betaflightなどスポーツ系のFCに慣れてしまっている方は注意が必要です。
この他、さまざまな形の機体を制御できる様なのですが、今回はこの一般的なマルチコプターの形ですので、QuadrotorXの資料が役に立ちます。
詳細は下記のURLのドキュメントをご確認ください。https://docs.px4.io/main/en/airframes/airframe_reference.html

上記がArdupilotのQuadcopterのモーター回転方向とモーターの番号。
やはりこちらも詳細は下記のドキュメントも合わせてご確認ください。
https://ardupilot.org/copter/docs/connect-escs-and-motors.html
上記二つの図を見ると、クアッドコプターの場合どちらのファームウェアでもモーターの回転方向と番号が同じだという事がわかります。
つまり最終的にPX4を使用する場合でも、Ardupilotを使用する場合でも、今の組み立ての時点ではCW、CCWの位置やモーター配線の番号は同じで大丈夫という事になりますね。
モーターの番号に関しては、ESCから出ているSBUSコネクターをフライトコントローラーに差し込む際に上記の通り配線すると楽なので(確か設定で変更する事もできた気がしますが、いつどのファームで試したか忘れました)その際にまた上記の図を見ながら作業を行います。

今大事なのは回転方向ですが、AIR GEAR 450の場合モーターのネジの頂点に銀の印があるモーターがCCWなので1と2の位置、印のないものがCWなので3と4の位置に取り付ける必要があります。

モーターとESCをコネクター接続し、大体長さの見当を付け、ESCから出ている赤と黒のワイヤーをPDBにハンダで接続します。
オレンジと黒のワイヤーで先にSBUSコネクターのついている配線は、後でフライトコントローラーに接続します。

PM06 V2に付属しているケーブルを取り付けておきます。
この6ピンケーブルのもう片側を後ほどフライトコントローラーに接続するのですが、フライトコントローラーに電源を供給するだけでなく、電圧、電流の情報も送る役割があります。
STEP3-3: Foldable GPS マウントの取り付け
次の工程でトッププレートを取り付けてしまうと、トッププレートの裏側にはアクセスできなくなってしまいますので、トッププレート自体にねじ止めするものは作業してしまいたいところです。
今回の構成で、最終的にトッププレートには色々乗せていく事になるのですが、ねじ止めするものはGPSだけになります。
今回使用しているHolybro Pixhawk4 mini (アルミケース) & GPS (UBLOX NEO-M8N) & PM06 V2というセット商品ですが、GPSのマウントも同封されています。
このマウントはFoldable GPS マウントというもので、単体でも購入可能です。

組み立てると上記の写真のようになります。
カーボンロッドが長いものと、短いもので選択できるようになっており、今回は特に短くする理由がなかった為、長いものを使用しました。

持ち運びの際などに根元の部分を折ってたためる様になっています。
輸送時に長いままだと何かにぶつかってカーボンロッドが折れたり、GPSセンサー自体が衝撃を受けて破損すると困るので、非常に便利なGPSマウントです。

トッププレートにGPSマウントを取り付けました。
X500のトッププレートには、Foldable GPS マウントを固定できる穴が空いています。
今回は機尾側に取り付けたのですが、機種側にも取り付けられる穴があり、工夫すればかなり搭載する場所は選べるのではないかと思います。
STEP3-4: MK15E エアユニット アンテナの配線

今回使用するMK15Eのエアユニットはそこそこ大きいので、この取り付け方法についてもこのタイミングで見当を付けておきましょう。
一般的なプロポのシステムでいうと受信機に当たる機器なのですが、MK15Eのエアユニットはテレメトリーを送信しますので、レシーバーとか受信機といった名前ではなくエアユニットという名前になっているものと考えられます。

送信するので、技適マークも付いている必要があります。
自分はこのタイミングでトッププレートを付けたり外したりして、搭載位置と配線の処理をかなり検討しました。

MK15Eエアユニットの配線はそこまで問題にならなかったのですが、アンテナの接続コネクター部分はかなり長いので、これをうまく処理しなければなりません。
また、このMK15Eエアユニットは6S-14Sという範囲の電圧で動作させなくてはならず、今回機体側の動作は全体として4S(モーターのKV値によってある程度決まってきてしまう)なので、エアユニット用に小さな6Sバッテリーを使用する必要がありそうです。
※初期ロットの MK15Eエアユニットは6S電圧で動作させる必要があったものの、現在のロットでは4S電圧での動作に対応しています。次回記事で紹介しますが、ここで使用されているエアユニットも4Sで動作する事が確認できましたので配線を変更しました。新しいロットのエアユニットも表記は6S-12Sのままで変更されていません。メーカーへ確認したところ、4Sで動作確認が取れれば4Sで使用して問題なく、もし動作しなくても低い電圧で給電することで壊れる心配はない為、確認してから判断して欲しいとのこと。

構造が少し違うので、恐らくX500V2では同じ様にできないのですが、今回折角初期型を使用していますので、ボディ部分に固定する方法を考えるのではなく、アームの先にアンテナを取り付ける形にしました。
長いアンテナの根元部分をアームのカーボンパイプ内に通して、スッキリしたレイアウトにできそうです。
トッププレートを付けてしまう前に後方2本のアームにアンテナを通しました。

この状態で全体的な長さに問題がないか、エアユニット本体も想定している位置に置いてみて、向きも決めてしまいます。
次回はSTEP4から
X500はボディのスペースも比較的広いので、今回紹介している方法以外にも様々なレイアウトが考えられ、拡張性もあり、将来的に色々試す事もできそうですね。
複雑そうに見えますが、1つ1つのパーツがそれなりに大きく、コネクターで接続できる様になっているものがほとんどなので、作業全体としては意外とスムーズに進むのではないかと思います。
いよいよ次回トッププレートを取り付け、フライトコントローラーにどんどん配線を行っていきたいと思います。










