

ARMATTAN ODONATA
ARMATTANからODONATA (トンボと言う意味らしいです) というフレームがリリースされました。
AUW100未満で組むことができ、何やらちゃんとフリースタイル的な飛行ができるもののようで、これなら屋外の狭い敷地だったり、驚くほど狭いギャップだったり、もしかしたら広めの屋内であっても、ODONATAがあればスポットに早変わり、かも知れないと思い早速試してみました。
今回はフレームキットの内容と、BETAFPV Meteor65 Proからそっくりそのままエレクトロニクスを載せ替えるお手軽ビルド方法、テストフライトを行った印象などをお伝えしたいと思います。
テストフライトの動画をYoutubeにアップロードしましたので、もしよかったらご覧ください。
フレームキットの内容

パッケージはいつも通りのARMATTANフレームなのですが、珍しい事に組み立て説明書が付属していませんでした。
とは言え、パーツ点数も少なく、搭載するパーツによって使い方は様々になってしまうでしょうから、もし説明書が付属していてもあまり意味がないかも知れません。
ARMATTANフレームの多くは保証がついているのですが、一部のフレームは保証が非常に部分的であったり、全くない場合もあります。
ARMATTANの場合、保証がないというのは販売価格を下げる為に保証をつけない、というパターンなのですが、このODONATAにも保証がなく、この企画自体がなるべく手頃な価格で楽しめる様配慮されていると考えられますね。

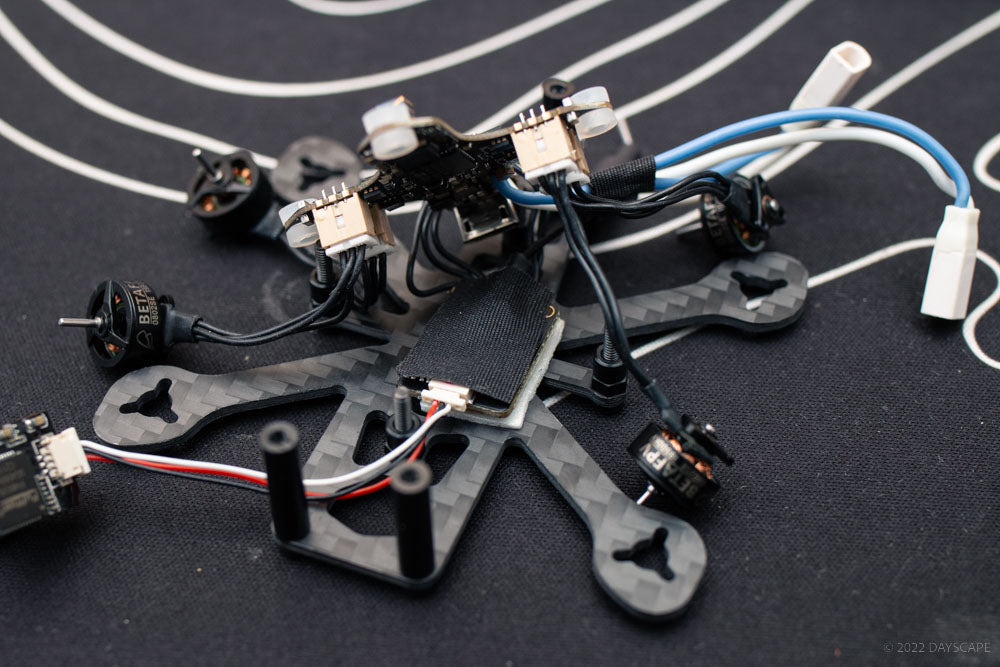
フレームキットの内容は上記の写真が全てで、非常にシンプルです。
BETAFPV Meteor65 Proからの載せ替え

フレームキットを購入する場合、そのフレームにあった企画のエレクトロニクスやモーター、FPVカメラを考えなければなりません。
5インチ機のように規格が統一されていて、ボディのスペースにも余裕があり、厚み方向に関してもある程度余裕がある場合はあまりストレスがないものと思いますが、機体が小さくなればなるほど搭載機器の選択がシビアになって来るもの。
今回はなるべく手軽に試せる方法が良いと思い、BETAFPV Meteor65 ProからFC、VTX、FPVカメラ、モーターを移植する事にしました。
Meteor65 Proは65mmクラスのTinyWhoopでありながら31mmではなく35mmのプロペラを採用した機体で、最大350mW VTX出力をもち、RCとしてはELRSを採用するなど、屋外飛行に対応できるスペックで、このクラスとしては至れり尽せりの機体と言えるでしょう。
家の中で遊ぶには少しスペックが勿体無いかなと思う一面がありつつ、外で遊ぶにはもう少し風に強い方がいいなという印象を持っていたので、これはODONATAには最適なのではないかと考えました。
ちなみに、入れづらいですが、Meteor65 ProのフレームにNewBeeDrone BeeBrain BLV3 AIO Flight Controllerを搭載することが出来るので、NewBeeDrone AcroBeeの内容をMeteor65 Proのフレームに載せ、35mmのプロペラを使用する事が可能です。
AcroBeeのカメラの方が暗さに強く見やすい印象があり、自分の場合カメラ角度もMeteor65 ProよりもAcroBeeの方が室内で遊ぶのに都合がよいので、Meteor65 ProとAcroBeeの気に入っているところを組み合わせて使用しています。
ELRSを使用する為にプロポや送信モジュールを追加購入したり、設定を調べなくてはならないので、その点においてはあまり手軽とは言えないのですが、Meteor65 Proに限らずODONATAに載せ替えて遊べるTinyWhoopはかなりあると思います。
自分は1S 300mhaのバッテリーしか持っておらず、さすがに容量が足りないのではないかと思いましたので、2つのバッテリーを並列で接続し600mhaで使用できるように電源用ピッグテールは変更しました。
この構成で3分くらいは問題なく飛行できますので、自分としてはひとまず満足したのですが、1本の450mhaバッテリーに変更して、その分軽量化するのも良いかも知れません。

はじめに課題になったのは、Meteor65 ProのFC (F4 1S 5A AIO) のモーター用コネクターがフレームに干渉してしまう点。
調べてみると、コネクターを外しハンダ付けに変更した方がよりパワーを引き出せるようなのですが、ESCのスペックとして連続5Aピーク 6A (3秒)までしか対応していないので、そこまで引き出されるのも少し心配という事もあり、コネクターは残したまま搭載する事にしました。

スタンドオフを取り付け、ボディ部分の高さを確認します。
上記写真程度浮かせて固定すれば振動も拾わずに、高さについてもボディ内に十分納める事ができそうです。
ちなみに、このスタンドオフはアルミではなくデルリンと言う樹脂系の素材で作られており、必要な強度を維持しながらアルミよりも軽量化する事に成功しているそうです。

この取り付けを行う為に、付属のネジ (M2ネジ部10mm) よりも長い12mmのネジを用意しました。

付属のナットでネジを固定します。
このメインフレームは1.5mm厚のカーボンプレートですが、全体の重量が軽い為、かなりクラッシュしましたが全く壊れる気配がありませんでした。

熱が心配なのですが、せっかくFCを浮かせたので空いたスペースにVTXを搭載したいと思い、今回はこの位置にVTXを固定する事にしました。
後ほど明らかになりますが、FCの上、トッププレートの裏側にも搭載する余裕はありそうなので、問題がある場合そちらに付け替えても良いかと思います。
ただ、トッププレートはバッテリー固定の際に輪ゴムを引っ張る関係で、利便性の部分では何も取り付けない方が良さそうです。
今のところ熱による問題も発生していないので、とりあえず一旦VTXはこの位置に取り付けます。
VTXを両面テープでメインフレームに貼り付け、念の為FCと接触しても問題がないよう絶縁テープを貼りました。
VTXを中央からずらして取り付けているのは、メインフレームの肉抜き部分からVTX基板 (M03 25-350mW) のボタンを押せるようにしている為です。

FCを取り付ける際、ナットとFCのゴムダンパーの間に高さを確保する為に高さ2mmくらいのスペーサーを取り付けました。
このスペーサーはMicro AlienやMicro Reverbのフルスクリューパックに含まれていたものですが、ナットをさらにつけたり、ゴムダンパーを入れたり、持っているもので工夫して高さを確保できれば問題ないかと思います。

付属のカメラマウントにFPVカメラを取り付けました。
このカメラマウントはFoxeer Razer Pico用に設計されているのですが、基板部分が収まり切っていないものの、レンズはしっかりフィットするので、Betafpv C02 FPV Micro Cameraをしっかり固定する事ができました。

カメラマウントをスタンドオフに差し込む形で取り付けます。
FPVカメラの基板がトッププレートに干渉してしまうため、実際にはもう少し低い位置まで押し込む必要がありました。

付属している輪ゴムをトッププレートに通した状態でトッププレートと取り付け、フォームのスキッドを貼り付けたり配線を固定すれば完成です。

スキッドに関してはARMATTAN Tadpoleと同じパターンなのですが、上記写真左側の付属しているフォームを、右側の様にカットして使用します。

重量計の最後の数字が一部消えてしまっているのですが、バッテリー搭載状態で44.2g。
バッテリーはBETAFPVの自信作であるBT2.0 コネクタを採用した、Meteor65 Proのものを使用しています。
飛ばしながらの調整

はじめはとりあえずACRO BEE75から取り外したNewBeeDrone Azi (Tri-Blade) 40mmを使用していましたが、クラッシュを重ねる事に先端が削れていった為、途中からHQ Micro Whoop Prop 40mmx2というブレードが2枚のものを使用しました。
個人的にはHQ Micro Whoop Prop 40mmx2の方が随分感触が良いように思います。
5インチほどではないにしても、75mmクラスのTinyWhoopはかなり普及している規格ですので、取り付けられるプロペラやモーターは様々なメーカーからリリースされており、自分の飛行スタイルに合わせて、組み合わせを楽しむ事ができそうです。

上記、ACRO BEEのデフォルトPIDなのですが、自分はTinyWhoopで遊ぶ場合、この設定からスタートしています。
これだとIが非常に低く、ギャップにカチッと向かっていく感覚が足りないので、主にIの値を上げて使用しているのですが、Black Boxログが使えない場合が多いTinyWhoopでどのように設定を追い込んでいくのが良いかよくわからなかった自分にとっては、ACRO BEEの初期設定はPIDだけでなく全体的によく出来ていて参考になりました。
こんなに高い数値のFFを見た事がなかったので初めは驚きましたが、TinyWhoopのようにフレーム自体も柔らかく、パワーの少ない機体では5インチフリースタイル機とは全然違う設定になっていくわけですね。

完全に話が外れましたが、先程のACROBEEデフォルト設定から初めて、ODONATAを飛ばしながらOSD上で設定を変更したのが上記の値。
遊びながら片手間で調整したので全然追い込めていないのですが、フレームがカーボンになっている分全体としては数値は落としていく方向で調整しないと振動が出てしまったり、舵の切り始めが機敏すぎたりしました。
もしかしたらODONATAの場合、TinyWhoopをベースに考えるのではなく、Betaflightそれ自体のデフォルトの数値から初めても良いかもしれません。
この他、パワー感を補う為にThrottle Boostを8まで上げました。
設定についても少し変更するとそれなりに違いがわかる感覚がありますので、小さいながらも本格派という印象を受けました。
ODONATAの立ち位置

従来、200g未満の機体であれば比較的気軽に運用する事ができ、そのくらいのクラスであればかなり本格的な機体を組む事ができたのですが、今年の法改正で模型航空機に分類される重量が100g未満に引き下げられた為、「気軽に楽しめるフリースタイル機」と呼べる機体を成立させる事は以前よりも難しくなりました。
何をもってフリースタイル機と呼ぶのかは難しく、機体のデザインよりも飛ばし方に依存する部分の方が大きいのですが、5インチフリースタイル機を経験した方が「満足できる」飛行体験を実現している機体は、実はあまりなかったのではないでしょうか。
ODONATAに「満足できる」かどうかは人それぞれだと思うのですが、ODONATAのモーターの搭載位置、ボディ形状とバッテリーの搭載位置などはまさに5インチフリースタイル機のバランス感になっていて、小さいながらもそれがしっかりとフィーリングに反映されているのが非常に面白いです。
当然小さくて軽く、パワーも少ないので5インチとは全然違うのですが、個人的にはこのODONATAは「気軽に楽しめるフリースタイル機」と呼べるのではないかと考えています。
従来からToothpickと呼ばれるカテゴリーはありましたし、このODONATAが、全く新しい「何か」と言う訳ではないと思うのですが、これまでにTinyWhoopが積み重ねて来た進化と、フリースタイルが探って来た小型軽量機の可能性が、ちょうど交差した地点、という雰囲気のフレームになっています。
同じくARMATTANのTadpoleもやはりそういった立ち位置だと思っているのですが、ODONATAの登場でより小型軽量に楽しめるようになったと言えそうです。
ODONATAを気軽にカバンに詰めて、新しいスポットを開拓しに出かけてみるのも面白いのではないかと思います。










